4.2 VIPS packages
4.2.1 Arithmetic
See Figure 4.1.
Arithmetic functions work on images as if each band
element were a separate number. All operations are
point-to-point — each output element depends exactly upon
the corresponding input element. All (except in a few cases
noted in the manual pages) will work with images of any
type (or any mixture of types), of any size and of any
number of bands.
Arithmetic operations try to preserve precision by
increasing the number of bits in the output image
when necessary. Generally, this follows the ANSI C
conventions for type promotion — so multiplying two
IM_BANDFMT_UCHAR images together, for example,
produces a IM_BANDFMT_USHORT image, and taking the
im_costra() of a IM_BANDFMT_USHORT image
produces a IM_BANDFMT_FLOAT image. The details of
the type conversions are in the manual pages.
$ vips list arithmetic
im_abs - absolute value
im_acostra - acos of image (result in degrees)
im_add - add two images
im_asintra - asin of image (result in degrees)
im_atantra - atan of image (result in degrees)
im_avg - average value of image
im_point_bilinear - interpolate value at single point, linearly
im_bandmean - average image bands
im_ceil - round to smallest integal value not less than
im_cmulnorm - multiply two complex images, normalising output
im_costra - cos of image (angles in degrees)
im_cross_phase - phase of cross power spectrum of two complex images
im_deviate - standard deviation of image
im_divide - divide two images
im_exp10tra - 10^pel of image
im_expntra - x^pel of image
im_expntra_vec - [x,y,z]^pel of image
im_exptra - e^pel of image
im_fav4 - average of 4 images
im_floor - round to largest integal value not greater than
im_gadd - calculate a⋆in1 + b⋆in2 + c = outfile
im_invert - photographic negative
im_lintra - calculate a⋆in + b = outfile
im_linreg - pixelwise linear regression
im_lintra_vec - calculate a⋆in + b -> out, a and b vectors
im_litecor - calculate max(white)⋆factor⋆(in/white), if clip == 1
im_log10tra - log10 of image
im_logtra - ln of image
im_max - maximum value of image
im_maxpos - position of maximum value of image
im_maxpos_avg - position of maximum value of image, averaging in case of draw
im_maxpos_vec - position and value of n maxima of image
im_measure - measure averages of a grid of patches
im_min - minimum value of image
im_minpos - position of minimum value of image
im_minpos_vec - position and value of n minima of image
im_multiply - multiply two images
im_powtra - pel^x ofbuildimage
im_powtra_vec - pel^[x,y,z] of image
im_remainder - remainder after integer division
im_remainderconst - remainder after integer division by a constant
im_remainderconst_vec - remainder after integer division by a vector of constants
im_rint - round to nearest integal value
im_sign - unit vector in direction of value
im_sintra - sin of image (angles in degrees)
im_stats - many image statistics in one pass
im_subtract - subtract two images
im_tantra - tan of image (angles in degrees)
Figure 4.1: Arithmetic functions
4.2.2 Relational
See Figure 4.2.
Relational functions compare images to other images or
to constants. They accept any image or pair of images
(provided they are the same size and have the same
number of bands — their types may differ) and produce a
IM_BANDFMT_UCHAR image with the same number of
bands as the input image, with 255 in every band element
for which the condition is true and 0 elsewhere.
They may be combined with the boolean functions to
form complex relational conditions. Use im_max() (or
im_min()) to find out if a condition is true (or false) for a
whole image.
$ vips list relational
im_blend - use cond image to blend between images in1 and in2
im_equal - two images equal in value
im_equal_vec - image equals doublevec
im_equalconst - image equals const
im_ifthenelse - use cond image to choose pels from image in1 or in2
im_less - in1 less than in2 in value
im_less_vec - in less than doublevec
im_lessconst - in less than const
im_lesseq - in1 less than or equal to in2 in value
im_lesseq_vec - in less than or equal to doublevec
im_lesseqconst - in less than or equal to const
im_more - in1 more than in2 in value
im_more_vec - in more than doublevec
im_moreconst - in more than const
im_moreeq - in1 more than or equal to in2 in value
im_moreeq_vec - in more than or equal to doublevec
im_moreeqconst - in more than or equal to const
im_notequal - two images not equal in value
im_notequal_vec - image does not equal doublevec
im_notequalconst - image does not equal const
Figure 4.2: Relational functions
4.2.3 Boolean
See Figure 4.3.
The boolean functions perform boolean arithmetic on
pairs of IM_BANDFMT_UCHAR images. They are useful for
combining the results of the relational and morphological
functions. You can use im_eorconst() with 255 as
im_not().
$ vips list boolean
im_andimage - bitwise and of two images
im_andimageconst - bitwise and of an image with a constant
im_andimage_vec - bitwise and of an image with a vector constant
im_orimage - bitwise or of two images
im_orimageconst - bitwise or of an image with a constant
im_orimage_vec - bitwise or of an image with a vector constant
im_eorimage - bitwise eor of two images
im_eorimageconst - bitwise eor of an image with a constant
im_eorimage_vec - bitwise eor of an image with a vector constant
im_shiftleft - shift integer image n bits to left
im_shiftright - shift integer image n bits to right
Figure 4.3: Boolean functions
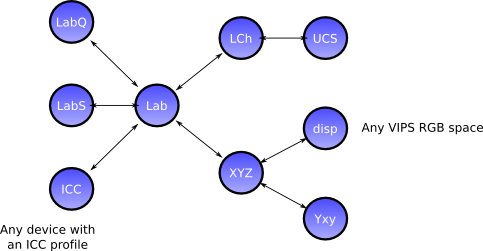
4.2.4 Colour
See Figure 4.5.
The colour functions can be divided into two main types.
First, functions to transform images between the different
colour spaces supported by VIPS: RGB (also referred to as
disp), sRGB, XYZ, Yxy, Lab, LabQ, LabS, LCh and
UCS), and second, functions for calculating colour
difference metrics. Figure 4.4 shows how the VIPS colour
spaces interconvert.
Figure 4.4: VIPS colour space conversion
The colour spaces supported by VIPS are:
-
LabQ
- This is the principal VIPS colorimetric storage
format. See the man page for im_LabQ2Lab()
for an explanation. You cannot perform
calculations on LabQ images. They are for storage
only. Also refered to as LABPACK.
-
LabS
- This format
represents coordinates in CIE L∗a∗b∗ space as a
three- band IM_BANDFMT_SHORT image, scaled
to fit the full range of bits. It is the best format for
computation, being relatively compact, quick, and
accurate. Colour values expressed in this way are
hard to visualise.
-
Lab
- Lab colourspace represents CIE L∗a∗b∗ colour
values with a three-band IM_BANDFMT_FLOAT
image. This is the simplest format for general
work: adding the constant 50 to the L channel, for
example, has the expected result.
-
XYZ
- CIE XYZ colour space represented as a three-band
IM_BANDFMT_FLOAT image.
-
XYZ
- CIE Yxy colour space represented as a three-band
IM_BANDFMT_FLOAT image.
-
RGB
- (also refered to as disp) This format is
similar to the RGB colour systems used in
other packages. If you want to export your
image to a PC, for example, convert your
colorimetric image to RGB, then turn it to TIFF
with im_vips2tiff(). You need to supply a
structure which characterises your display. See the
manual page for im_col_XYZ2rgb() for hints
on these guys.
VIPS also supports sRGB. This is a version
of RGB with a carefully defined and standard
conversion from XYZ. See:
http://www.color.org/
-
LCh
- Like Lab, but rectangular ab coordinates are replaced
with polar Ch (Chroma and hue) coordinates. Hue
angles are expressed in degrees.
-
UCS
- A colour space based on the CMC(1:1) colour
difference measurement. This is a highly uniform
colour space, much better than CIE L∗a∗b∗ for
expressing small differences. Conversions to and from
UCS are extremely slow.
All VIPS colourspaces assume a D65 illuminant.
The colour-difference functions calculate either ΔE
CIE L∗a∗b∗ (1976 or 2000) or ΔE CMC(1:1) on two
images in Lab, XYZ or disp colour space.
$ vips list colour
im_LCh2Lab - convert LCh to Lab
im_LCh2UCS - convert LCh to UCS
im_Lab2LCh - convert Lab to LCh
im_Lab2LabQ - convert Lab to LabQ
im_Lab2LabS - convert Lab to LabS
im_Lab2UCS - convert Lab to UCS
im_Lab2XYZ - convert D65 Lab to XYZ
im_Lab2XYZ_temp - convert Lab to XYZ, with a specified colour temperature
im_Lab2disp - convert Lab to displayable
im_LabQ2LabS - convert LabQ to LabS
im_LabQ2Lab - convert LabQ to Lab
im_LabQ2XYZ - convert LabQ to XYZ
im_LabQ2disp - convert LabQ to displayable
im_LabS2LabQ - convert LabS to LabQ
im_LabS2Lab - convert LabS to Lab
im_UCS2LCh - convert UCS to LCh
im_UCS2Lab - convert UCS to Lab
im_UCS2XYZ - convert UCS to XYZ
im_XYZ2Lab - convert D65 XYZ to Lab
im_XYZ2Lab_temp - convert XYZ to Lab, with a specified colour temperature
im_XYZ2UCS - convert XYZ to UCS
im_XYZ2Yxy - convert XYZ to Yxy
im_XYZ2disp - convert XYZ to displayble
im_XYZ2sRGB - convert XYZ to sRGB
im_Yxy2XYZ - convert Yxy to XYZ
im_dE00_fromLab - calculate delta-E CIE2000 for two Lab images
im_dECMC_fromLab - calculate delta-E CMC(1:1) for two Lab images
im_dECMC_fromdisp - calculate delta-E CMC(1:1) for two displayable images
im_dE_fromLab - calculate delta-E for two Lab images
im_dE_fromXYZ - calculate delta-E for two XYZ images
im_dE_fromdisp - calculate delta-E for two displayable images
im_disp2Lab - convert displayable to Lab
im_disp2XYZ - convert displayable to XYZ
im_float2rad - convert float to Radiance packed
im_icc_ac2rc - convert LAB from AC to RC using an ICC profile
im_icc_export - convert a float LAB to an 8-bit device image with an ICC profile
im_icc_export_depth - convert a float LAB to device space with an ICC profile
im_icc_import - convert a device image to float LAB with an ICC profile
im_icc_import_embedded - convert a device image to float LAB using the embedded profile
im_icc_present - test for presence of ICC library
im_icc_transform - convert between two device images with a pair of ICC profiles
im_lab_morph - morph colourspace of a LAB image
im_rad2float - convert Radiance packed to float
im_sRGB2XYZ - convert sRGB to XYZ
Figure 4.5: Colour functions
4.2.5 Conversion
See Figure 4.6.
These functions may be split into three broad groups:
functions which convert between the VIPS numeric formats
(im_clip2fmt(), for example, converts an image of
any type to the specified IM_BANDFMT), functions
supporting complex arithmetic (im_c2amph(), for
example, converts a complex image from rectangular to
polar co ordinates) and functions which perform some
simple geometric conversion (im_extract() forms a
sub-image).
gbandjoin and the C function im_gbandjoin()
will do a bandwise join of many images at the same time.
See the manual pages.
$ vips list conversion
im_bandjoin - bandwise join of two images
im_bernd - extract from pyramid as jpeg
im_black - generate black image
im_c2amph - convert real and imaginary to phase and amplitude
im_c2imag - extract imaginary part of complex image
im_c2ps - find power spectrum of complex image
im_c2real - extract real part of complex image
im_c2rect - convert phase and amplitude to real and imaginary
im_clip2c - convert to signed 8-bit integer
im_clip2cm - convert to complex
im_clip2d - convert to double-precision float
im_clip2dcm - convert to double complex
im_clip2f - convert to single-precision float
im_clip2fmt - convert image format to ofmt
im_clip2i - convert to signed 32-bit integer
im_clip2s - convert to signed 16-bit integer
im_clip2ui - convert to unsigned 32-bit integer
im_clip2us - convert to unsigned 16-bit integer
im_clip - convert to unsigned 8-bit integer
im_copy - copy image
im_copy_morph - copy image, setting pixel layout
im_copy_swap - copy image, swapping byte order
im_copy_set - copy image, setting informational fields
im_copy_set_meta - copy image, setting a meta field
im_extract_area - extract area
im_extract_areabands - extract area and bands
im_extract_band - extract band
im_extract_bands - extract several bands
im_extract - extract area/band
im_falsecolour - turn luminance changes into chrominance changes
im_fliphor - flip image left-right
im_flipver - flip image top-bottom
im_gbandjoin - bandwise join of many images
im_grid - chop a tall thin image into a grid of images
im_insert - insert sub-image into main image at position
im_insert_noexpand - insert sub-image into main image at position, no expansion
im_lrjoin - join two images left-right
im_mask2vips - convert DOUBLEMASK to VIPS image
im_msb - convert to uchar by discarding bits
im_msb_band - convert to single band uchar by discarding bits
im_print - print string to stdout
im_recomb - linear recombination with mask
im_replicate - replicate an image horizontally and vertically
im_ri2c - join two non-complex images to form complex
Figure 4.6: Conversion functions
im_rot180 - rotate image 180 degrees
im_rot270 - rotate image 270 degrees clockwise
im_rot90 - rotate image 90 degrees clockwise
im_scale - scale image linearly to fit range 0-255
im_scaleps - logarithmic scale of image to fit range 0-255
im_rightshift_size - decrease size by a power-of-two factor
im_slice - slice an image using two thresholds
im_subsample - subsample image by integer factors
im_system - run command on image
im_tbjoin - join two images top-bottom
im_text - generate text image
im_thresh - slice an image at a threshold
im_vips2mask - convert VIPS image to DOUBLEMASK
im_wrap - shift image origin, wrapping at sides
im_zoom - simple zoom of an image by integer factors
Figure 4.7: Conversion functions (cont.)
4.2.6 Matricies
See Figure 4.8.
VIPS uses matricies for morphological operations, for
convolutions, and for some colour-space conversions. There
are two types of matrix: integer (INTMASK) and double
precision floating point (DOUBLEMASK).
For convenience, both types are stored in files as ASCII.
The first line of the file should start with the matrix
dimensions, width first, then on the same line an optional
scale and offset. The two size fields should be integers; the
scale and offset may be floats. Subsequent lines should
contain the matrix elements, one row per line. The scale
and offset are the conventional ones used to represent
non-integer values in convolution masks — in other
words:

If the scale and offset are missing, they default to 1.0 and
0.0. See the sections on convolution for more on the use of
these fields. So as an example, a 4 by 4 identity matrix
would be stored as:
4 4
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
And a 3 by 3 mask for block averaging with convolution
might be stored as:
3 3 9 0
1 1 1
1 1 1
1 1 1
(in other words, sum all the pels in every 3 by 3 area, and
divide by 9).
This matrix contains only integer elements and so could
be used as an argument to functions expecting both
INTMASK and DOUBLEMASK matricies. However, masks
containing floating-point values (such as the output of
im_matinv()) can only be used as arguments to
functions expecting DOUBLEMASKs.
A set of functions for mask input and output are also
available for C-programmers — see the manual pages for
im_read_dmask(). For other matrix functions,
see also the convolution sections and the arithmetic
sections.
$ vips list matrix
im_matcat - append matrix in2 to the end of matrix in1
im_matinv - invert matrix
im_matmul - multiply matrix in1 by matrix in2
im_mattrn - transpose matrix
Figure 4.8: Matrix functions
4.2.7 Convolution
See Figure 4.9.
The functions available in the convolution package can be
split into five main groups.
First, are the convolution functions. The most useful
function is im_conv() which will convolve any
non-complex type with an INTMASK matrix. The output
image will have the same size, type, and number of bands as
the input image. Of the other im_conv() functions,
functions whose name ends in _raw do not add a black
border around the output image, functions ending in f use
a DOUBLEMASK matrix and write float (or double)
output, and functions containing sep are for seperable
convolutions. im_compass(), im_lindetect()
and im_gradient() convolve with rotating masks.
im_embed() is used by the convolution functions to add
the border to the output.
Next, are the build functions. im_gauss_⋆mask() and
its ilk generate gaussian masks, im_log_⋆mask()
generate logs of Laplacians. im_addgnoise() and
im_gaussnoise() create or add gaussian noise to an
image.
Two functions do correlation: im_fastcor() does a
quick and dirty correlation, im_spcor() calculates true
spatial correlation, and is rather slow.
Some functions are provided for analysing images:
im_zerox() counts zero-crossing points in an image,
im_mpercent() finds a threshold that will isolate a
percentage of points in an image.
Finally, im_resize_linear() and im_shrink()
do as you would expect.
$ vips list convolution
im_addgnoise - add gaussian noise with mean 0 and std. dev. sigma
im_compass - convolve with 8-way rotating integer mask
im_contrast_surface - find high-contrast points in an image
im_contrast_surface_raw - find high-contrast points in an image
im_conv - convolve
im_conv_raw - convolve, no border
im_convf - convolve, with DOUBLEMASK
im_convf_raw - convolve, with DOUBLEMASK, no border
im_convsep - seperable convolution
im_convsep_raw - seperable convolution, no border
im_convsepf - seperable convolution, with DOUBLEMASK
im_convsepf_raw - seperable convolution, with DOUBLEMASK, no border
im_convsub - convolve uchar to uchar, sub-sampling by xskip, yskip
im_dmask_xsize - horizontal size of a doublemask
im_dmask_ysize - vertical size of a doublemask
im_embed - embed in within a set of borders
im_fastcor - fast correlate in2 within in1
im_fastcor_raw - fast correlate in2 within in1, no border
im_gauss_dmask - generate gaussian DOUBLEMASK
im_gauss_imask - generate gaussian INTMASK
im_gauss_imask_sep - generate separable gaussian INTMASK
im_gaussnoise - generate image of gaussian noise with specified statistics
im_grad_x - horizontal difference image
im_grad_y - vertical difference image
im_gradcor - non-normalised correlation of gradient of in2 within in1
im_gradcor_raw - non-normalised correlation of gradient of in2 within in1, no padding
im_gradient - convolve with 2-way rotating mask
im_imask_xsize - horizontal size of an intmask
im_imask_ysize - vertical size of an intmask
im_rank_image - point-wise pixel rank
im_lindetect - convolve with 4-way rotating mask
im_log_dmask - generate laplacian of gaussian DOUBLEMASK
im_log_imask - generate laplacian of gaussian INTMASK
im_maxvalue - point-wise maximum value
im_mpercent - find threshold above which there are percent values
im_phasecor_fft - non-normalised correlation of gradient of in2 within in1
im_rank - rank filter nth element of xsize/ysize window
im_rank_raw - rank filter nth element of xsize/ysize window, no border
im_read_dmask - read matrix of double from file
im_resize_linear - resize to X by Y pixels with linear interpolation
im_rotate_dmask45 - rotate DOUBLEMASK clockwise by 45 degrees
im_rotate_dmask90 - rotate DOUBLEMASK clockwise by 90 degrees
im_rotate_imask45 - rotate INTMASK clockwise by 45 degrees
im_rotate_imask90 - rotate INTMASK clockwise by 90 degrees
im_sharpen - sharpen high frequencies of L channel of LabQ
im_shrink - shrink image by xfac, yfac times
im_spcor - normalised correlation of in2 within in1
im_spcor_raw - normalised correlation of in2 within in1, no black padding
im_stretch3 - stretch 3%, sub-pixel displace by xdisp/ydisp
im_zerox - find +ve or -ve zero crossings in image
Figure 4.9: Convolution functions
4.2.8 In-place operations
See Figure 4.10.
A few of the in-place operations are available from the
command-line. Most are not.
$ vips list inplace
im_circle - plot circle on image
im_flood_blob_copy - flood while pixel == start pixel
im_insertplace - draw image sub inside image main at position (x,y)
im_line - draw line between points (x1,y1) and (x2,y2)
im_lineset - draw line between points (x1,y1) and (x2,y2)
Figure 4.10: In-place operations
4.2.9 Frequency filtering
See Figure 4.11.
The basic Fourier functions are im_fwfft() and
im_invfft(), which calculate the fast-fourier transform
and inverse transform of an image. Also im_invfftr(),
which just returns the real part of the inverse transform. The
Fourier image has its origin at pel (0,0) — for viewing, use
im_rotquad() to move the origin to the centre of the
image.
Once an image is in the frequency domain, it can be
filtered by multiplying it with a mask image. The VIPS
mask generator is im_create_fmask() see the manual
page for details of the arguments, but it will create low pass,
high pass, ring pass and band pass filters, which may each
be ideal, Gaussian or Butterworth. There is also a fractal
mask option.
The other functions in the package build on these base
facilities. im_freqflt() transforms an input image
to Fourier space, multiplies it by a mask image, and
transforms it back again. im_flt_image_freq() will
create a mask image of the correct size for you, and call
im_freqflt(). im_disp_ps() will call the right
combinations of functions to make a displayable power
spectrum for an image.
$ vips list freq_filt
im_create_fmask - create frequency domain filter mask
im_disp_ps - make displayable power spectrum
im_flt_image_freq - frequency domain filter image
im_fractsurf - generate a fractal surface of given dimension
im_freqflt - frequency-domain filter of in with mask
im_fwfft - forward fast-fourier transform
im_rotquad - rotate image quadrants to move origin to centre
im_invfft - inverse fast-fourier transform
im_invfftr - real part of inverse fast-fourier transform
Figure 4.11: Fourier functions
4.2.10 Histograms and LUTs
See Figure 4.12.
VIPS represents histograms and look-up tables in the
same way — as images.
They should have either Xsize or Ysize set to 1, and
the other dimension set to the number of elements in the
table. The table can be of any size, have any band format,
and have any number of bands.
Use im_histgr() to find the histogram of an
image. Use im_histnD() to find the n-dimensional
histogram of an n-band image. Perform operations on
histograms with im_histcum(), im_histnorm(),
im_histspec(), im_invertlut(). Visualise
histograms with im_histplot(). Use a histogram (or
LUT) to transform an image with im_maplut(). Build a
histogram from scratch with im_identity() or
im_identity_ushort().
Use im_lhist⋆() for local histogram equalisation,
and im_stdif⋆() for statisticaol differencing. The
im_tone_⋆() functions are for operations on the L
channel of a LAB image. Other functions are useful
combinations of these basic operations.
$ vips list histograms_lut
im_gammacorrect - gamma-correct image
im_heq - histogram-equalise image
im_hist - find and graph histogram of image
im_histcum - turn histogram to cumulative histogram
im_histeq - form histogram equalistion LUT
im_histgr - find histogram of image
im_histnD - find 1D, 2D or 3D histogram of image
im_histnorm - form normalised histogram
im_histplot - plot graph of histogram
im_histspec - find histogram which will make pdf of in match ref
im_hsp - match stats of in to stats of ref
im_identity - generate identity histogram
im_identity_ushort - generate ushort identity histogram
im_ismonotonic - test LUT for monotonicity
im_lhisteq - local histogram equalisation
im_lhisteq_raw - local histogram equalisation, no border
im_invertlut - generate correction table from set of measures
im_buildlut - generate LUT table from set of x/y positions
im_maplut - map image through LUT
im_project - find horizontal and vertical projections of an image
im_stdif - statistical differencing
im_stdif_raw - statistical differencing, no border
im_tone_analyse - analyse in and create LUT for tone adjustment
im_tone_build - create LUT for tone adjustment of LabS images
im_tone_build_range - create LUT for tone adjustment
im_tone_map - map L channel of LabS or LabQ image through LUT
Figure 4.12: Histogram/LUT functions
4.2.11 Morphology
See Figure 4.13.
The morphological functions are used on one-band
IM_BANDFMT_UCHAR binary images (images containing
only zero and not-zero). They search images for particular
patterns of pixels (specified with the mask argument), either
adding or removing pixels when they find a match. They are
useful for cleaning up images — for example, you might
threshold an image, and then use one of the morphological
functions to remove all single isolated pixels from the
result.
If you combine the morphological operators with
the mask rotators (im_rotate_imask45(), for
example) and apply them repeatedly, you can achieve
very complicated effects: you can thin, prune, fill, open
edges, close gaps, and many others. For example, see
‘Fundamentals of Digital Image Processing’ by A. Jain, pp
384-388, Prentice-Hall, 1989 for more ideas.
Beware that VIPS reverses the usual image processing
convention, by assuming white objects on a black
background.
The mask you give to the morphological functions should
contain only the values 0 (for background), 128 (for don’t
care) and 255 (for object). The mask must have odd length
sides — the origin of the mask is taken to be the centre
value. For example, the mask:
3 3
128 255 128
255 0 255
128 255 128
applied to an image with im_erode(), will find all black
pixels 4-way connected with white pixels. Essentially,
im_dilate() sets pixels in the output if any part of the
mask matches, whereas im_erode() sets pixels only if all
of the mask matches.
The _raw() version of the functions do not add a
black border to the output. im_cntlines() and
im_profile are occasionally useful for analysing
results.
See the boolean operations im_and(), im_or() and
im_eor() for analogues of the usual set difference and set
union operations.
$ vips list morphology
im_cntlines - count horizontal or vertical lines
im_dilate - dilate image with mask, adding a black border
im_dilate_raw - dilate image with mask
im_erode - erode image with mask, adding a black border
im_erode_raw - erode image with mask
im_profile - find first horizontal/vertical edge
Figure 4.13: Morphological functions
4.2.12 Mosaicing
See Figure 4.2.12.
These functions are useful for joining many small images
together to make one large image. They can cope with
unstable contrast, and arbitary sub-image layout, but will
not do any geometric correction. The mosaicing functions
can be grouped into layers:
The lowest level functions are im_correl(). and
im_affine(). im_correl() searches a large image
for a small sub-image, returning the position of the best
sub-image match. im_affine() performs a general
affine transform on an image: that is, any transform in
which parallel lines remain parallel.
Next, im_lrmerge() and im_tbmerge() blend two
images together left-right or up-down.
Next up are im_lrmosaic() and im_tbmosaic().
These use the two low-level merge operations to join two
images given just an approximate overlap as a start point.
Optional extra parameters let you do ’balancing’ too: if
your images have come from a source where there
is no precise control over the exposure (for example,
images from a tube camera, or a set of images scanned
from photographic sources), im_lrmosaic() and
im_tbmosaic() will adjust the contrast of the left image
to match the right, the right to the left, or both to some
middle value.
The functions im_lrmosaic1() and im_tbmosaic1()
are first-order analogues of the basic mosaic functions:
they take two tie-points and use them to rotate and
scale the right-hand or bottom image before starting to
join.
Finally, im_global_balance() can be used to
re-balance a mosaic which has been assembled with
these functions. It will generally do a better job than the
low-level balancer built into im_lrmosaic() and
im_tbmosaic(). See the man page. im_remosaic()
uses the same techniques, but will reassemble the image
from a different set of source images.
$ vips list mosaicing
im_align_bands - align the bands of an image
im_correl - search area around sec for match for area around ref
im__find_lroverlap - search for left-right overlap of ref and sec
im__find_tboverlap - search for top-bottom overlap of ref and sec
im_global_balance - automatically rebuild mosaic with balancing
im_global_balancef - automatically rebuild mosaic with balancing, float output
im_lrmerge - left-right merge of in1 and in2
im_lrmerge1 - first-order left-right merge of ref and sec
im_lrmosaic - left-right mosaic of ref and sec
im_lrmosaic1 - first-order left-right mosaic of ref and sec
im_match_linear - resample ref so that tie-points match
im_match_linear_search - search sec, then resample so that tie-points match
im_maxpos_subpel - subpixel position of maximum of (phase correlation) image
im_remosaic - automatically rebuild mosaic with new files
im_tbmerge - top-bottom merge of in1 and in2
im_tbmerge1 - first-order top-bottom merge of in1 and in2
im_tbmosaic - top-bottom mosaic of in1 and in2
im_tbmosaic1 - first-order top-bottom mosaic of ref and sec
captionMosaic functions
4.2.13 CImg functions
See Figure 4.14.
These operations wrap the anisotropic blur function from
the CImg library. They are useful for removing noise from
images.
$ vips list cimg
im_greyc - noise-removing filter
im_greyc_mask - noise-removing filter, with a mask
Figure 4.14: CImg functions
4.2.14 Other
See Figure 4.15.
These functions generate various test images. You can
combine them with the arithmetic and rotate functions to
build more complicated images.
The im_benchmark⋆() operations are for testing the
VIPS SMP system.
$ vips list other
im_benchmark - do something complicated for testing
im_benchmark2 - do something complicated for testing
im_benchmarkn - do something complicated for testing
im_eye - generate IM_BANDFMT_UCHAR [0,255] frequency/amplitude image
im_grey - generate IM_BANDFMT_UCHAR [0,255] grey scale image
im_feye - generate IM_BANDFMT_FLOAT [-1,1] frequency/amplitude image
im_fgrey - generate IM_BANDFMT_FLOAT [0,1] grey scale image
im_fzone - generate IM_BANDFMT_FLOAT [-1,1] zone plate image
im_make_xy - generate image with pixel value equal to coordinate
im_zone - generate IM_BANDFMT_UCHAR [0,255] zone plate image
Figure 4.15: Other functions
4.2.15 IO functions
See Figure 4.16.
These functions are related to the image IO system.
$ vips list iofuncs
im_binfile - open a headerless binary file
im_cache - cache results of an operation
im_guess_prefix - guess install area
im_guess_libdir - guess library area
im_header_get_type - return field type
im_header_int - extract int fields from header
im_header_double - extract double fields from header
im_header_string - extract string fields from header
im_version - VIPS version number
im_version_string - VIPS version string
Figure 4.16: IO functions
4.2.16 Format functions
See Figure 4.17.
These functions convert to and from various image
formats. See §2.5 for a nice API over these. VIPS can
read more than these formats, see the man page for
VipsFormat.
$ vips list format
im_csv2vips - read a file in csv format
im_jpeg2vips - convert from jpeg
im_magick2vips - load file with libMagick
im_png2vips - convert PNG file to VIPS image
im_exr2vips - convert an OpenEXR file to VIPS
im_ppm2vips - read a file in pbm/pgm/ppm format
im_analyze2vips - read a file in analyze format
im_tiff2vips - convert TIFF file to VIPS image
im_vips2csv - write an image in csv format
im_vips2jpeg - convert to jpeg
im_vips2mimejpeg - convert to jpeg as mime type on stdout
im_vips2png - convert VIPS image to PNG file
im_vips2ppm - write a file in pbm/pgm/ppm format
im_vips2tiff - convert VIPS image to TIFF file
Figure 4.17: Format functions
4.2.17 Resample functions
See Figure 4.18.
These functions resample images with various
interpolators.
$ vips list resample
im_affine - affine transform
im_affinei - affine transform
im_affinei_all - affine transform of whole image
im_similarity_area - output area xywh of similarity transformation
im_similarity - similarity transformation
Figure 4.18: Resample functions